

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-15
Kan bussgränssnitt av absolut fotoelektrisk axelkodare
1 Introduktion Den absoluta fotoelektriska axelvinkelkodaren är en mätanordning för digital vinkel som mäter vinkelläget och vinkelhastigheten för den roterande axeln i realtid. Den konverterar axelvinkelinformationen till digitala koder i form av grader, minuter och sekunder, och bussanslutningen kan realisera mätning i realtid. Det har fördelarna med hög arbetande tillförlitlighet, stark anti-inblandningsförmåga, hög precision, avstängningsminne och så vidare. Det används allmänt i digital mätspårning och positioneringssystem såsom skytteutrustning, digital teodolit, radar och viss stor militär utrustning.
I dessa praktiska applikationskontrollsystem, på grund av de olika datastrukturerna för sensorer och detektorer för varje delsystem, kommer den absoluta fotoelektriska axelkodaren att använda olika interna datakommunikation, främst inklusive Rs232, Rs485 / 488 serieportar, parallella portar, etc. . I specifika tekniska applikationer är emellertid ovanstående kommunikationsmetoder ofta begränsade av transmissionsavstånd och kommunikationshastighet. Under de senaste åren har seriekommunikation utvecklats snabbt och en mängd olika kontrollsystemfältbussformer har dykt upp. Can -bussen är en av de mest använda. Det är förkortningen av Controller Local Area Network Bus och är ett effektivt stöd för distribuerad kontroll och realtidskontroll. Seriellt kommunikationsnätverk. På grund av den höga prestanda, höga tillförlitligheten och unika designen av CAN-buss har den blivit den mest populära och realtidsfältbussen hemma och utomlands. Utvecklingen och förändringarna av interna kommunikationsmetoder i kontrollsystemet gör att kodaren används för att mäta vinkelförskjutning och vinkelhastighet ger ett CAN -bussgränssnitt för att uppfylla fältbussdesignkraven i hela styrsystemet.
2 Kodare Arbetsprincip och dataöverföring
2.1 Arbetsprincip Kodaren består av två delar: en datainsamling och en databehandlingsenhet. Det strukturella blockdiagrammet visas i 1. Den enskilda chipmikrodatorn är kärndelen av kodarkretssystemet. Efter att ha samlat in kodarsignalerna (grov kod, medelstora finkod, finkod) är den delad av finkod, kodkanalkorrigering, digital tillägg, elektrisk nolljustering, mjukvarubehandling som examen, minut och andra konvertering och slutligen visning och slutligen visning och Förstå gränssnittet med styrsystemet.
2.2 Dataöverföring Dataöverföringen mellan kodaren och styrsystemet kan användas i både parallella och seriella lägen. Parallell överföring överför data genom den parallella porten. Varje data kräver en kärna i datakabeln. Till exempel krävs en 24-kärnkabel för en 24-bitars kodare. Därför är användningsutrymmet begränsat, och det är endast lämpligt för kortdistansöverföring och speciella krav. tillfälle. Vid seriell överföring överförs datainformation seriellt genom ett tvinnat par, och ytterligare bitar läggs till enligt olika kommunikationsprotokoll för att implementera funktioner såsom felkorrigering. Denna funktion kan utvidgas till databussystem. Seriell växellåda har färre ledningar, mindre hårdvara, låg kostnad, långt transmissionsavstånd och säker och pålitlig data.

2.3 Föreslagen kodare kan bussgränssnitt I en omfattande jämförelse av olika fältbussar har kommunikationssystemet baserat på CAN -buss många utmärkta egenskaper: datasignalen överförs med differentiell spänning; Bussöverföringsmediet kan använda tvinnat par, koaxialkabel och optisk fiber; kan arbeta i flera master-läge, flexibelt kommunikationsläge; kan överföra och ta emot data i punkt-till-punkt, punkt-till-multipoint och global sändningsläge; Nodinformation i nätverket kan delas in i olika prioriteringar för att uppfylla olika realtidskrav; Icke-förstörande buss skiljedomsteknik; Uppgifterna antar kort ramstruktur, varje ram är 8BYTE och datafelfrekvensen är låg; MAC -underlaget för datalänkskiktet i kommunikationsprotokollet har strikta feldetekteringsfunktioner; Det har internationella standarder och god öppenhet. I omvandlingen av det interna kommunikationsläget för det fotoelektriska spårningssystemet används därför buss som datakommunikationsbussstruktur, och sedan föreslås kodaren CAN -bussgränssnittet.
3 Tillämpning av kodare kan bussgränssnitt i fotoelektriskt spårningssystem
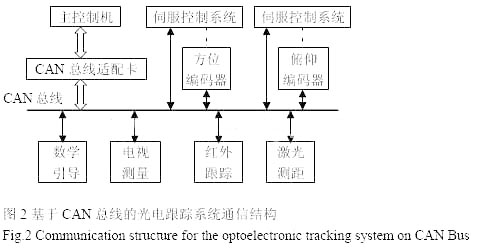
3.1 Kodaren används för positionsdetektering av det fotoelektriska spårningssystemet. Den absoluta fotoelektriska axelkodaren är en sensor för att mäta azimut och tonhöjdsvinkel för det fotoelektriska spårningssystemet i det fotoelektriska spårningssystemet. Den interna busstrukturen för det fotoelektriska spårningssystemet omvandlas till CAN -busskommunikationsmetoden. CAN -bussgränssnittet har egenskaperna för flexibelt gränssnitt och linjebesparing. Samtidigt har den en mikroprocessor och kan användas som en intelligent nod i systemet för att skicka fjärrramar direkt till andra enheter för att uppnå intelligent kontroll. Figur 2 är ett kommunikationsstrukturdiagram för det fotoelektriska spårningssystemet baserat på CAN -buss. Det fotoelektriska spårningssystemet använder en enda seriell bussstruktur av CAN -buss istället för den parallella strukturen för flera kommunikationsmetoder. Azimut- och tonhöjdsvinklarna uppmätt med de två fotoelektriska kodarna skickas till huvudkontrollmaskinen via bussen, och huvudkontrollmaskinen bearbetar data i enlighet därmed. Genom busstyrningsservokontrollsystemet kan alla undersystem anslutas tillsammans med ett par tvinnade par, vilket förenklar systemledningen, förbättrar det övergripande systembussen för systembuss, realtidsöverföring och systemskalbarhet och bitfelet hastigheten minskar kraftigt.
3.2 Kodare nodburk bussgränssnitt hårdvarukomposition
CAN -bussgränssnittet består huvudsakligen av enstaka chipmikrodator, CAN -bussstyrenhet, CAN -bussdrivrutin och fotoelektrisk isoleringshårdvara. Den specifika kretsen i CAN -busskommunikationsgränssnittet visas i figur 3.
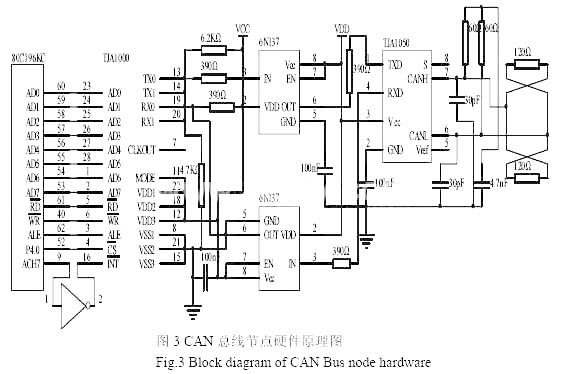
Enkel-chipdatorn väljer Intel80C196KC, som är en 16-bitars inbäddad mikrokontroller, som är mer lämplig för komplexa realtidskontroll tillfällen. Det är också ansvarigt för databehandlingen av kodaren och initialiseringen av bussnoden. CAN-styrenheten väljer Philips Semiconductors SJA1000 för att förverkliga datakommunikationsgränssnittet mellan bussen och värddatorn (kontrolldator), stöder CAN2.0A och CAN2.0B-protokoll, har en utökad 64-byte mottagningsbuffert och stöder först-in först-in först-in först i -OUT (FIFO) Princip, Support 11-Bit och 29-Bit Identification Codes, Communication Bit Rate upp till 1 Mbps, kan fungera i BasicCan-läge och Pelican-läge. CAN-busschauffören väljer Philips TJA1050, som är en höghastighetsbusschaufför, som tillhandahåller gränssnittet mellan CAN-styrenheten och den fysiska bussen, inser differentiella överförings- och mottagningsfunktioner för CAN-bussen, och har ett brett gemensamt lägeområde Under stark elektromagnetisk interferensdifferentialmottagningsförmåga är ingångsnivån kompatibel med 3,3V -enheter, och opowered noder kommer inte att störa bussen. Att gå med i TJA1050 kan säkerställa höghastighetsdatakommunikation. För säkerhet och förbättrad anti-jammingförmåga använder användningen av TJA1050 bra symmetriska prestandaegenskaper, separata terminaler. Två små kondensatorer på 30pf är anslutna parallellt mellan canh och canl och mark, vilket kan filtrera bort högfrekvensstörningar på bussen och en viss förmåga att förhindra elektromagnetisk strålning. För att ytterligare förbättra systemets anti-interference-förmåga används en höghastighets optokopplare 6N137 mellan CAN-styrenheten SJA1000 och CAN-föraren TJA1050 att bilda en isoleringskrets för att uppnå galvanisk isolering. Strömförsörjningen VCC och VDD på båda sidor av 6N137 är helt isolerade, vilket kan förhindra kretsen samtidigt, två 120Ω bussimpedansmatchningsmotstånd bör anslutas i båda ändarna av bussen.
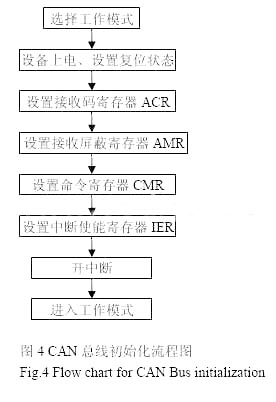
3.3 Nodprogramvara Design Vinkelinformationen (grader, minuter och sekunder) för den absoluta fotoelektriska axelkodaren skickas från CAN -styrenheten till CAN -bussen eller från buss till burkbuffert automatiskt av SJA1000 -bussregulatorn. Dess CAN -program för kommunikation av bussgränssnitt består av initialiseringssubrogram, skickar underprogram och tar emot underprogram. Välj först CAN BUS -arbetsläge enligt de faktiska systembehovet. Här väljer du Pelican -läget, 12MHz Crystal Oscillator, bussdataöverföringshastigheten är inställd på 500 kBits / s, varje bussnod bör ställa in samma dataöverföringshastighet för att säkerställa normal kommunikation. Bestäm att den fysiska anslutningen mellan SJA1000 och MCU är tillförlitlig och sedan initialisera SJA1000 -styrenheten. Ställ in det ursprungliga tillståndet för varje register i SJA1000 -återställningsläget. Initialiseringsflödesdiagrammet visas i figur 4. Överföring och mottagning av data uppnås av den sändande subroutinen och den mottagande subroutinen. Meddelande -ID bestämmer flödet av noddata. När du skickar data är inställningsprincipen för Message ID Reception Flag Bit -segmentet: Motsvarande ID för noden som måste tas emot är biten 0 och de återstående bitarna är 1. När du får data är det motsatsen. Det bedöms av ID om det är information som skickas till sig själv. Det tas emot, inte filtreras.
4. Slutsats
Som kommunikationsbuss på fältnivå har CAN-buss hög tillförlitlighet och kostnadsprestanda. Den absoluta fotoelektriska axelkodaren med CAN -bussgränssnitt gör den mer flexibel för användning i kontrollsystem.
Den här artikeln är innovativ: kodarens bussgränssnitt och dess tillämpning i det fotoelektriska spårningssystemet
Dela på:
Skicka förfrågan

Ms. carol Dong
Tel:86-431-85543703
Fax:86-431---88634119
Mobiltelefon:+8613894866263
E-post:sales@encoders.com.cn
Adress:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobile Site
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.